|
|
||
|---|---|---|
| data | ||
| exp | ||
| experiments | ||
| images | ||
| models | ||
| readme | ||
| src | ||
| .gitignore | ||
| .travis.yml | ||
| LICENSE | ||
| NOTICE | ||
| README.md | ||
| requirements.txt | ||
README.md
Objects as Points
Object detection, 3D detection, and pose estimation using center point detection:

Objects as Points,
Xingyi Zhou, Dequan Wang, Philipp Krähenbühl,
arXiv technical report (arXiv 1904.07850)
Contact: zhouxy@cs.utexas.edu. Any questions or discussions are welcomed!
Abstract
Detection identifies objects as axis-aligned boxes in an image. Most successful object detectors enumerate a nearly exhaustive list of potential object locations and classify each. This is wasteful, inefficient, and requires additional post-processing. In this paper, we take a different approach. We model an object as a single point -- the center point of its bounding box. Our detector uses keypoint estimation to find center points and regresses to all other object properties, such as size, 3D location, orientation, and even pose. Our center point based approach, CenterNet, is end-to-end differentiable, simpler, faster, and more accurate than corresponding bounding box based detectors. CenterNet achieves the best speed-accuracy trade-off on the MS COCO dataset, with 28.1% AP at 142 FPS, 37.4% AP at 52 FPS, and 45.1% AP with multi-scale testing at 1.4 FPS. We use the same approach to estimate 3D bounding box in the KITTI benchmark and human pose on the COCO keypoint dataset. Our method performs competitively with sophisticated multi-stage methods and runs in real-time.
Highlights
-
Simple: One-sentence method summary: use keypoint detection technic to detect the bounding box center point and regress to all other object properties like bounding box size, 3d information, and pose.
-
Versatile: The same framework works for object detection, 3d bounding box estimation, and multi-person pose estimation with minor modification.
-
Fast: The whole process in a single network feedforward. No NMS post processing is needed. Our DLA-34 model runs at 52 FPS with 37.4 COCO AP.
-
Strong: Our best single model achieves 45.1AP on COCO test-dev.
-
Easy to use: We provide user friendly testing API and webcam demos.
Main results
Object Detection on COCO validation
| Backbone | AP / FPS | Flip AP / FPS | Multi-scale AP / FPS |
|---|---|---|---|
| Hourglass-104 | 40.3 / 14 | 42.2 / 7.8 | 45.1 / 1.4 |
| DLA-34 | 37.4 / 52 | 39.2 / 28 | 41.7 / 4 |
| ResNet-101 | 34.6 / 45 | 36.2 / 25 | 39.3 / 4 |
| ResNet-18 | 28.1 / 142 | 30.0 / 71 | 33.2 / 12 |
Keypoint detection on COCO validation
| Backbone | AP | FPS |
|---|---|---|
| Hourglass-104 | 64.0 | 6.6 |
| DLA-34 | 58.9 | 23 |
3D bounding box detection on KITTI validation
| Backbone | FPS | AP-E | AP-M | AP-H | AOS-E | AOS-M | AOS-H | BEV-E | BEV-M | BEV-H |
|---|---|---|---|---|---|---|---|---|---|---|
| DLA-34 | 32 | 96.9 | 87.8 | 79.2 | 93.9 | 84.3 | 75.7 | 34.0 | 30.5 | 26.8 |
All models and details are available in our Model zoo.
Installation
Please refer to INSTALL.md for installation instructions.
Use CenterNet
We support demo for image/ image folder, video, and webcam.
First, download the models (By default, ctdet_coco_dla_2x for detection and
multi_pose_dla_3x for human pose estimation)
from the Model zoo and put them in CenterNet_ROOT/models/.
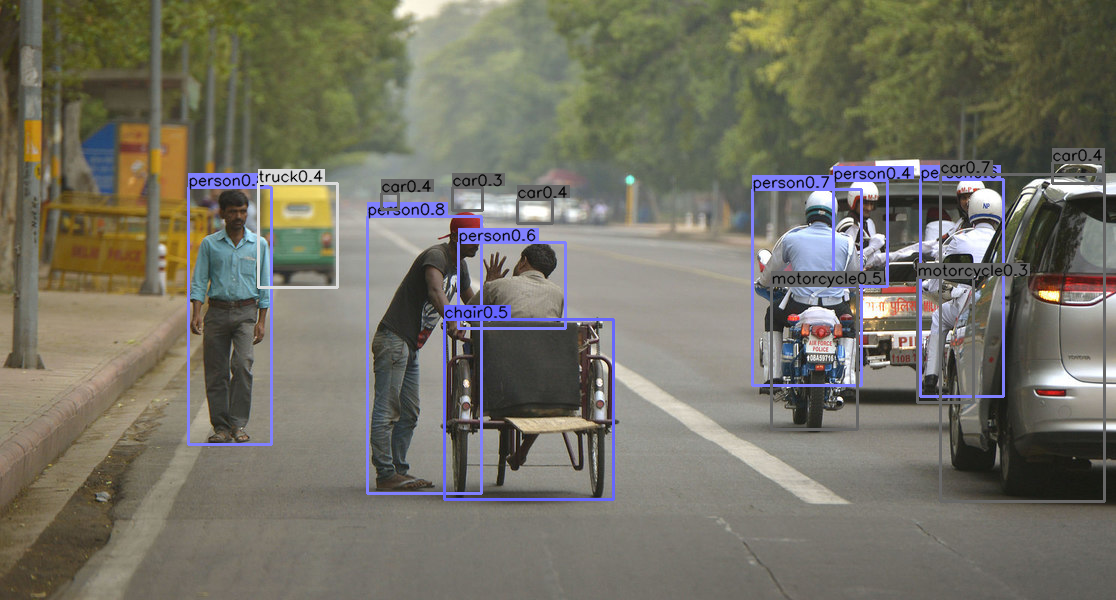
For object detection on images/ video, run:
python demo.py ctdet --demo /path/to/image/or/folder/or/video --load_model ../models/ctdet_coco_dla_2x.pth
We provide example images in CenterNet_ROOT/images/ (from Detectron). If set up correctly, the output should look like

For webcam demo, run
python demo.py ctdet --demo webcam --load_model ../models/ctdet_coco_dla_2x.pth
Similarly, for human pose estimation, run:
python demo.py multi_pose --demo /path/to/image/or/folder/or/video/or/webcam --load_model ../models/multi_pose_dla_3x.pth
The result for the example images should look like:



You can add --debug 2 to visualize the heatmap outputs.
You can add --flip_test for flip test.
To use this CenterNet in your own project, you can
import sys
CENTERNET_PATH = /path/to/CenterNet/src/lib/
sys.path.insert(0, CENTERNET_PATH)
from detectors.detector_factory import detector_factory
from opts import opts
MODEL_PATH = /path/to/model
TASK = 'ctdet' # or 'multi_pose' for human pose estimation
opt = opts().init('{} --load_model {}'.format(TASK, MODEL_PATH).split(' '))
detector = detector_factory[opt.task](opt)
img = image/or/path/to/your/image/
ret = detector.run(img)['results']
ret will be a python dict: {category_id : [[x1, y1, x2, y2, score], ...], }
Benchmark Evaluation and Training
After installation, follow the instructions in DATA.md to setup the datasets. Then check GETTING_STARTED.md to reproduce the results in the paper. We provide scripts for all the experiments in the experiments folder.
Develop
If you are interested in training CenterNet in a new dataset, use CenterNet in a new task, or use a new network architecture for CenterNet, please refer to DEVELOP.md. Also feel free to send us emails for discussions or suggestions.
Third-party resources
- Keras Implementation: keras-centernet from see--.
- CenterNet + DeepSORT tracking implementation: centerNet-deep-sort from kimyoon-young.
- Blogs on training CenterNet on custom datasets (in Chinese): ships from Rhett Chen and faces from linbior.
License
CenterNet itself is released under the MIT License (refer to the LICENSE file for details). Portions of the code are borrowed from human-pose-estimation.pytorch (image transform, resnet), CornerNet (hourglassnet, loss functions), dla (DLA network), DCNv2(deformable convolutions), tf-faster-rcnn(Pascal VOC evaluation) and kitti_eval (KITTI dataset evaluation). Please refer to the original License of these projects (See NOTICE).
Citation
If you find this project useful for your research, please use the following BibTeX entry.
@inproceedings{zhou2019objects,
title={Objects as Points},
author={Zhou, Xingyi and Wang, Dequan and Kr{\"a}henb{\"u}hl, Philipp},
booktitle={arXiv preprint arXiv:1904.07850},
year={2019}
}